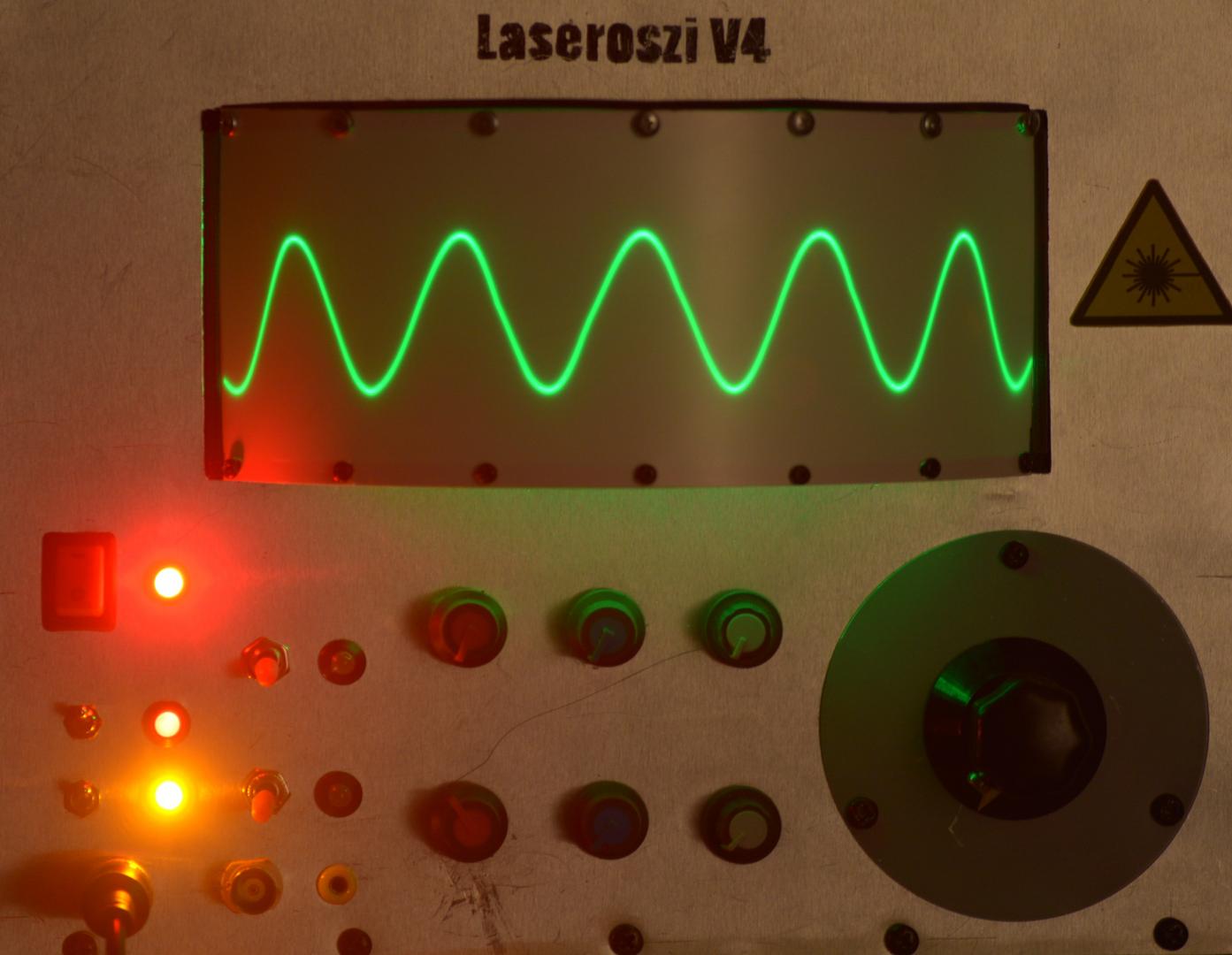
Der 4. Prototyp des Laseroszis
!!! ACHTUNG: ARTIKEL NOCH IN ARBEIT & NICHT VOLLSTÄNDIG!!!
In diesem Artikel wird hauptsächlich auf die Verbesserungen gegenüber des vorherigen
prototyps eingegangen.
Details
- Versorgungsspannung: 12V
- Bandbreite: approx. 450-500Hz
- Einstellungen:
- AC-/DC-Kopplung
- Y-Offset
Verbesserte Eigenschaften
Vergleich der alten mit der neuen Version.
| alt | neu | |
|---|---|---|
| Bandbreite | ~ 100Hz | ~ 450-500Hz |
| Ungefähre Größe (Vergleich mit DIN-Format, von vorne gesehen) |
DIN A3 | DIN A4 |
| Verzerrung bei der Darstellung | JA | NEIN |
Aufbau
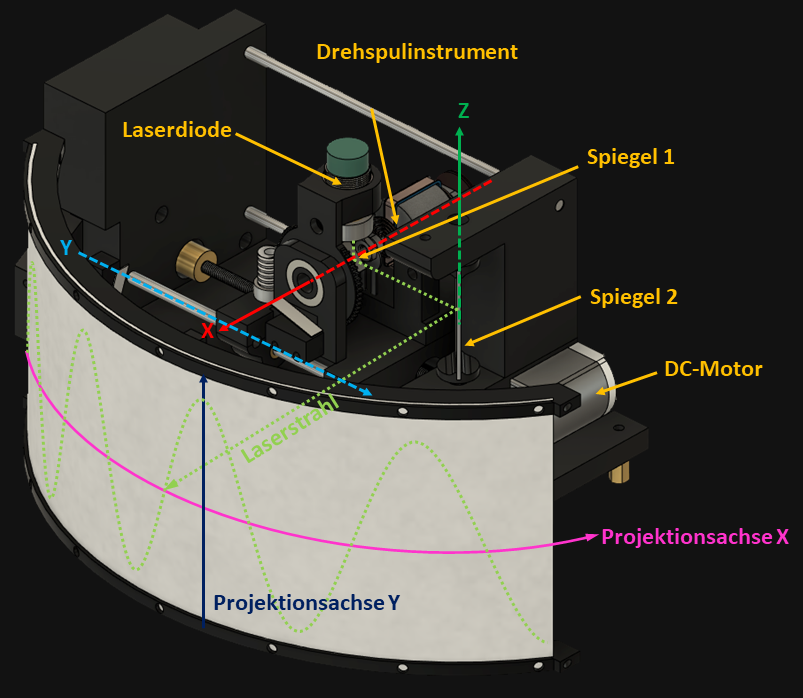
Das Oszilloskop besteht aus einem Ausgabeschirm (Abb. 1), dessen Koordinatensystem durch $x$- und $y$-Koordinaten definiert ist. Auf dem Schirm wird ein Laserpunkt mit Hilfe der Spiegel – Spiegel 1 und Spiegel 2 - projiziert, wobei Spiegel 2 für die Ablenkung in $x$- und Spiegel 1 für die Ablenkung in $y$-Richtung verantwortlich ist. Spiegel 2 rotiert hierfür mit Hilfe eines Motors um die Rotationsachse $Z$, während Spiegel 1 auf einem Drehspulinstrument sitzt, und sich mit dessen Hilfe um die Rotationsachse $X$ bewegt. Der Laser ist an einem Arm befestigt, um diesen auf den Spiegel Spiegel 1 zu justieren. Im Zusammenspiel der Ablenkung des Lasers durch beide Spiegel, kann der Laserstrahl in $x$- und $y$-Achse auf dem Ausgabebildschirm verschoben werden, wodurch sich eine Kurve ergibt.
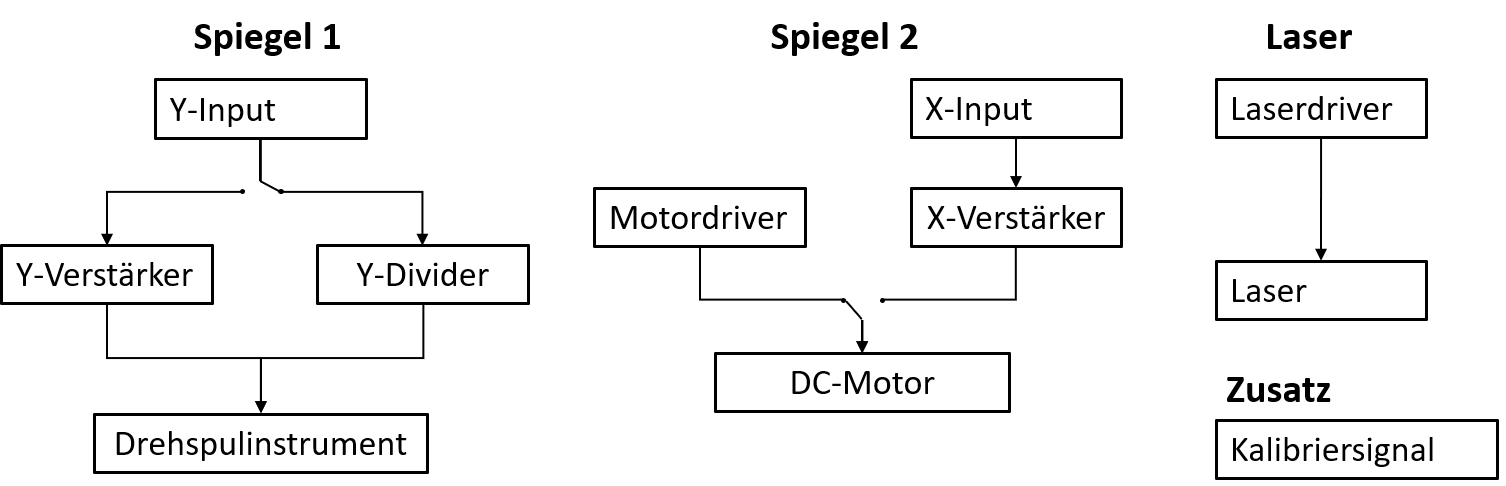
Ansteuerung von Spiegel 1
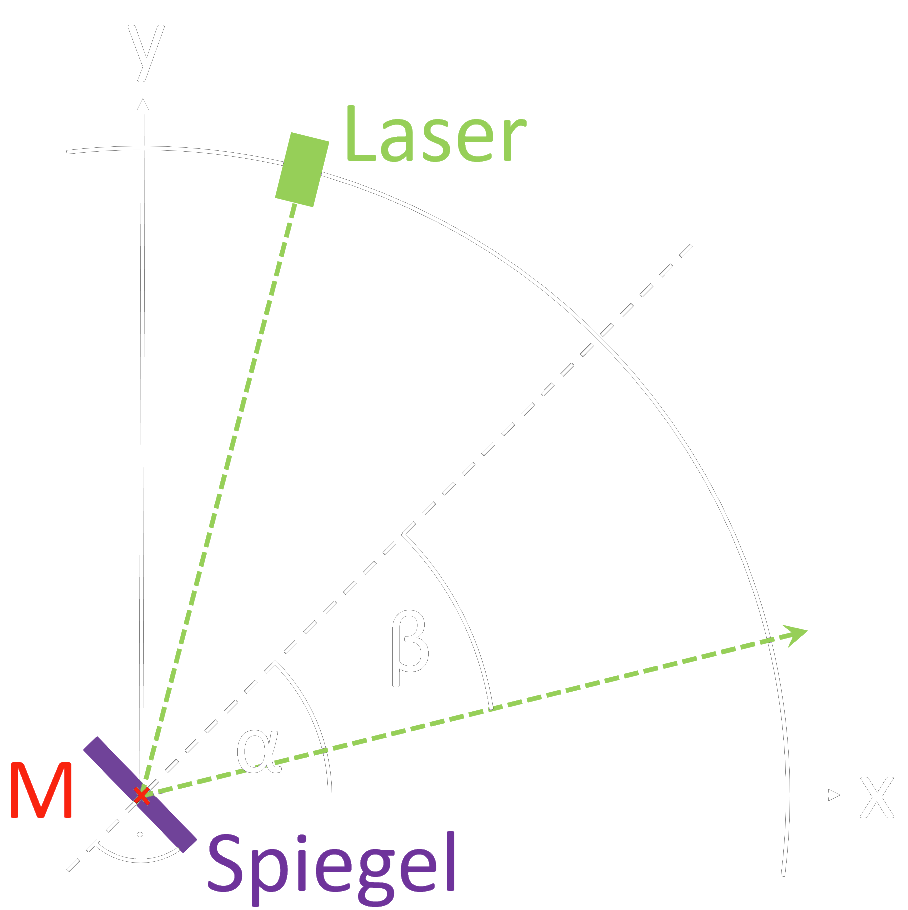
Die optisch-mechanischen Bewegungen basieren auf dem physikalischen Gesetz der Reflexion, wobei gilt: $\beta_{ein} = \beta_{aus}$. Um des Weiteren mit dem Oszilloskop Messungen durchführen zu können, ist oft auch eine Verschiebung der Kurve auf der $y$-Achse auf dem Ausgabebildschirm notwendig. Damit diese Anforderungen umgesetzt werden können, bediene ich mich einem Beispiel der Mathematik, dem Einheitskreis, und setze dieses mathematische Modell (Abb. 3) in eine mechanische Konstruktion um.
Mathematik hinter Spiegel 1
Der Spiegel sitzt in einem $45$-Grad-Winkel auf dem Mittelpunkt $M$, der sich aufgrund des eingespeisten Signals um den Winkel $\alpha$ ändert. Der Ein- und Ausfallswinkel verändert sich damit ebenfalls in Abhängigkeit von $\alpha$. Verschiebt sich zudem die Laserquelle auf der Kreisbahn, verändert sich dadurch auch der Wert des Ein- und Ausfallswinkels $\beta$, da auf $\beta$ ein zusätzlicher Winkel addiert wird. Als Resultat der Verschiebung auf der Kreisbahn, ändert sich die Position der auf dem Schirm dargestellten Kurve auf der $y$-Achse.
Die Mechanik
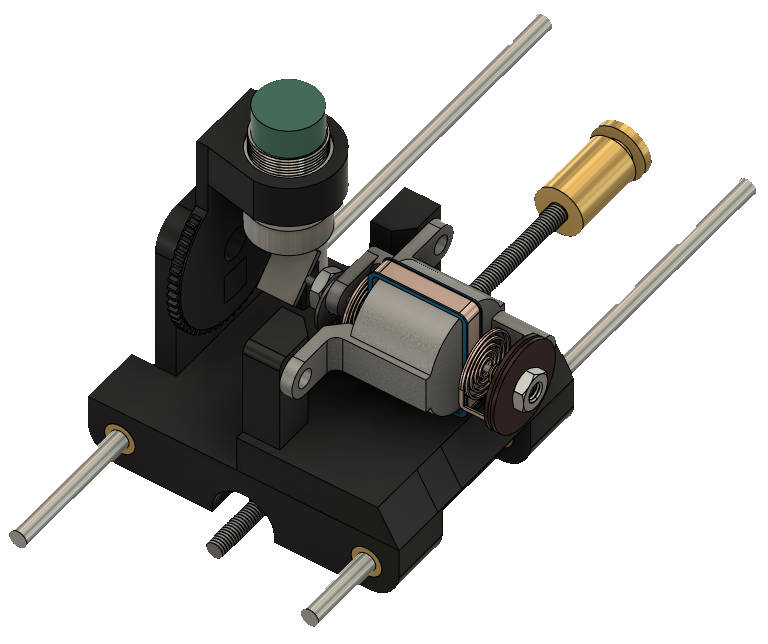
Die gesamte Konstruktion für die $y$-Ablenkung sitzt auf zwei Achsen, und lässt sich über einen Stepper Motor (oder alternativ auch mit einer Kurbel auf der anderen Seite des Oszilloskops) und einer Gewindestange parallel zum Schirm verschieben (Abb. 4). Dadurch lässt sich per Projektionsgesetz die Projektion der $y$-Achse vergrößern.
Der Spiegel für die $y$-Ablenkung ist am Zeiger eines Drehspulinstruments zur Spannungsmessung befestigt und ändert je nach Signaleingang den Winkel um die Rotationsachse des Messgeräts. Somit ändert sich je nach anliegender Spannung auch der ein und Ausfallswinkel des Lasers.
Um wie oben angesprochen den Laser auf der Kreisbahn um den Spiegel verschieben zu können, ist dieser an einem über eine Schnecke angetrieben Zahnrad befestigt, die über einen kleinen Stepper Motor (alternativ auch wieder eine Kurbel) bewegt wird. Somit lässt sich dieser entlang der Kreisbahn verschieben.
Die Elektronik
Der Y- bzw. X-Verstärker
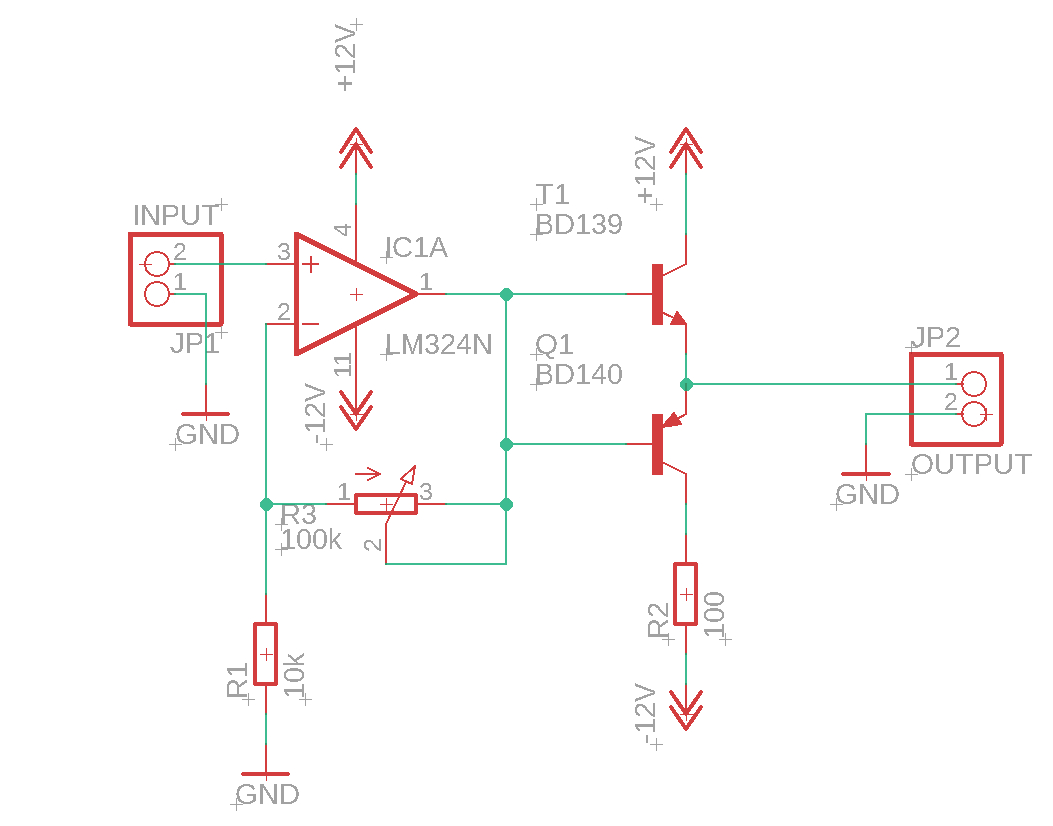
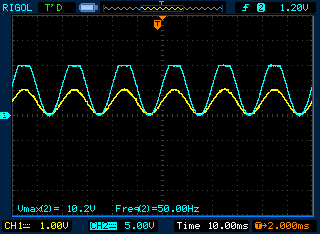
Die Verstärker der $x$- bzw. $y$-Achse sind im Aufbau gleich (Abb. 5). Er besteht aus einem Operationsverstärker, auf den dann eine einfache Transistorverstärkerstufe folgt. Bei der Schaltung handelt es sich um einen sog. „nichtinvertierenden Verstärker“, wodurch das eingespeiste Signal nur verstärkt, aber nicht in Phase etc. verändert wird. Über das Potentiometer $R3$ lässt sich der Verstärkungsfaktor einstellen. Betrieben wird die Schaltung mit $\pm 12 V$, wodurch sich auch Wechselspannungen verstärken lassen. Das Ausgangssignal des Operationsverstärkers wird über einen NPN und PNP Transistor nochmals verstärkt. Der Verstärker wurde mit Hilfe der Software „LTSpice“ simuliert und verbessert und stellte sich in der Umsetzung auch als funktionstüchtig heraus (Abb. 6; Abb. 7).
Spannungsversorgung des Verstärkers
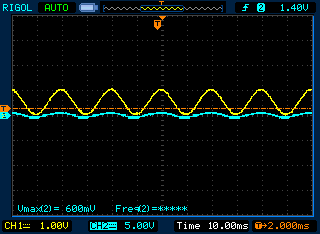
Um die Notwendigen $-12 V$ für den Operationsverstärker zu bekommen, beinhaltet die Schaltung unter anderem auch ein kleines Schaltnetzteil. Hierbei wird über ein von einen NE555 erzeugtes $12 V$ Rechtecksignal ein MOSFET betrieben, der dadurch die Primärseite eines Übertragertrafos auf Masse zieht, was dann in einer induzierten Wechselspannung in der Sekundärspule resultiert. Diese wird dann gleichgerichtet und geglättet. Um nun die negative Spannung bezüglich Masse zu bekommen, wird der positive Teil auf Masse gelegt. Der 7912, ein Festspannungsregler für eine negative Spannung, wandelt dann den negativen Teil in eine konstante Spannung von $-12 V$ um. Das vom NE555 erzeugte Signal beläuft sich auf ca. $20 kHz$ und wurde dafür ähnlich wie das Kalibriersignal – dementsprechend jedoch mit anderen Werten - berechnet. Die gesamte Schaltung (Abbildung 8) wurde zudem in „LTSpice“ simuliert, wo sich die untenstehende Spannungskurve (Abbildung 9) ergab.

Der Y-Divider
Ansteuerung von Spiegel 2 (Ablenkung in x-Richtung)
Mechanik
Der in $y$-Richtung modulierte Strahl fällt auf einen sich um die Rotationsachse $Z$ (Abb. 1) rotierenden Spiegel. Durch die Rotation des Spiegels ändert sich konstant der Austrittswinkel des Lasers, sodass der Auftreffpunkt des Laserstrahls auf dem Schirm von links nach rechts wandert. Im Zusammenspiel der Spiegel 1 und 2 kann das eingegebene Signal genau dargestellt werden, da jeder $y$-Wert nun eindeutig einem $x$-Wert bzw. $t$-Wert zugeordnet werden kann.
Der Spiegel besteht aus der Datenträgerscheibe einer alten Festplatte. Durch die beidseitige spiegelnde Beschichtung lässt sie sich hervorragend als doppelseitigen Spiegel benutzen. Dieser „Spiegel“ ist zwischen zwei Scheiben eingeklemmt und wird über ein Schneckenrad von einem DC-Motor zum Drehen gebracht. Das Schneckenrad dient hierbei der Verringerung der Geschwindigkeit. Zudem sind die Achsen auf denen die Scheiben Sitzen über Kugellager gelagert, um eine möglichst gleichmäßige Rotation zu garantieren.
Bei den vorherigen Prototypen lag das Problem darin, dass sich der Motor nicht langsam genug drehte und somit nur ein Ausschnitt der Kurve sichtbar war, da diese in $x$-Richtung extrem gedehnt wurde. Dies liegt unter anderem daran, dass sich eine Änderung der Spiegelposition auf den Laserstrahl doppelt so stark auswirkt, da sich Ein- und Ausfallswinkel addieren. Um das Problem zu beheben, muss man also die Winkelgeschwindigkeit – sprich die Rotation – verringern.
Ansteuerung des DC-Motors
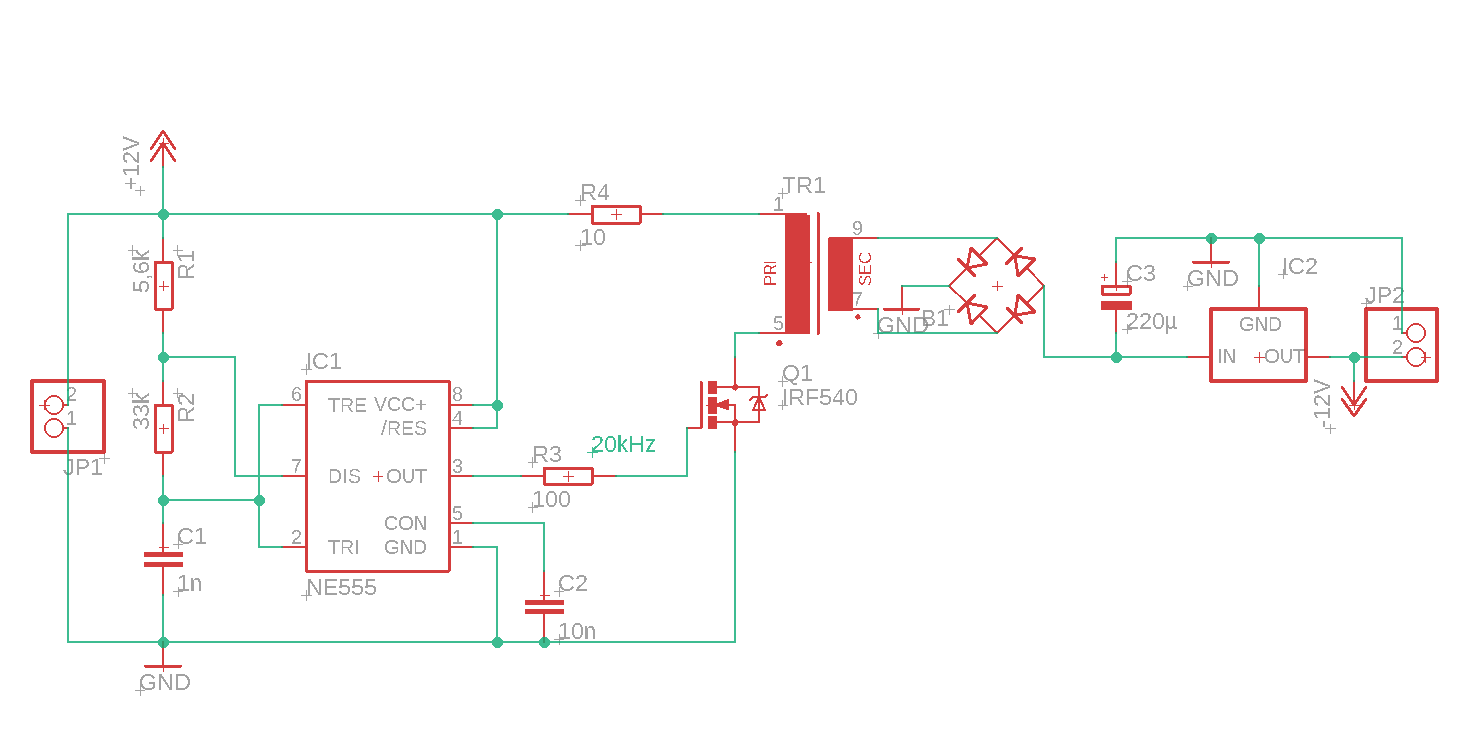
Der Motor entstamm einem alten Drucker und ist den kleinen DC-Motoren, die sich oft auch in Spielzeugen wiederfinden lassen, ähnlich. Bei Experimenten mit dem Motor stellte sich heraus, dass mindestens eine Spannung von $1,2V$ für den Betrieb des Motors nötig ist.
Die Ansteuerung des DC-Motors ist prinzipiell gleich aufgebaut wie die Stromversorgung des Lasers . Hierbei wurden jedoch einige der Widerstandswerte geändert, sodass sich mithilfe eines $1k$-Potentiometers die Ausgegebene Spannung zwischen ungefähr $1,2V$ und $6,4V$ stufenlos einstellen lässt. Das Resultat ist eine stufenlose Regelung des Motors von der Höchstgeschwindigkeit bis hin zum absoluten Stillstand. Durch die Möglichkeit den Motor auf eine sehr geringe Geschwindigkeit bringen zu können, lässt sich die $x$-Achse der angezeigten Kurve viel stärker Stauchen, was das Abbilden niederfrequenter Signale erleichtert. Die Schaltung wurde zudem mit Hilfe der Software „LTSPICE“ simuliert.
Stromversorgung des Lasers
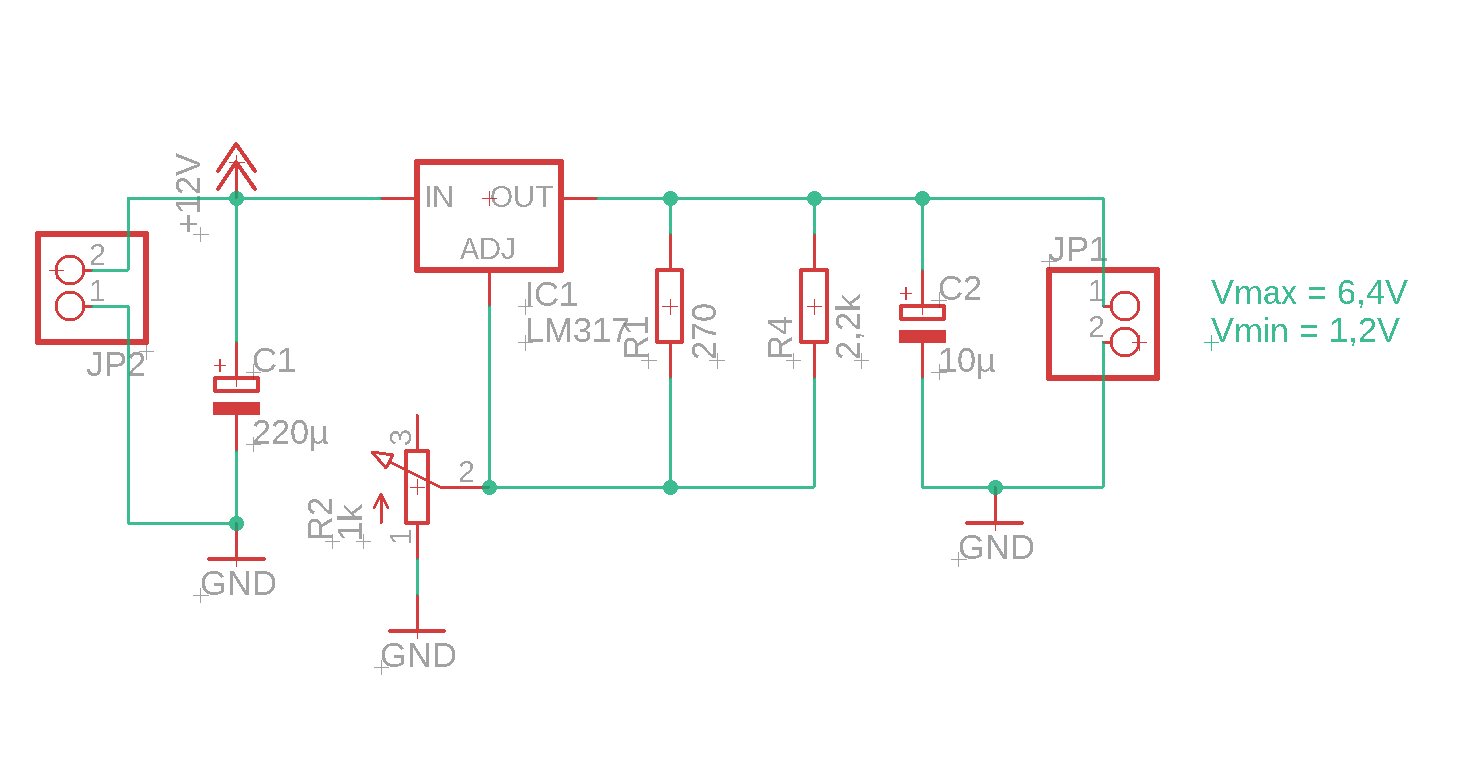
Die Stromversorgung des Lasers (Abbildung 13) basiert auf dem Festspannungsregler LM317T. Die Formel $U_{OUT} = 1,25\cdot(1+\frac{R_3}{R_{1,2}})$ beschreibt die Output-Spannung des Reglers und wird mit Hilfe des Ohmschen Gesetzes und des Datenblattes hergeleitet. Die Schaltung wurde basierend auf dieser Formel für eine maximale Spannung von $3V$ berechnet, da der Laser bei einer größeren Spannung als $3V$ zerstört wird.
Um die Helligkeit des Lasers einstellen zu können, sollte sich jedoch die Spannung etwas verringern lassen. Bei der Dimensionierung der Schaltung soll zudem der Widerstand $R_{1+2}$ als Ausgangspunkt für die Berechnung der Schaltung einen empfohlenen Standardwert von $240\Omega$ haben. Um den benötigten Widerstand $R_3$ zu berechnen, der zusammen mit $R_{1+2}$ für die Einstellung der auszugebenden Spannung zuständig ist, stellte ich die Formel nach $R_3$ um und errechnete einen Widerstand von $336\Omega$ (Formel 2). $R_3$ wurde dann durch einen Widerstand von $100\Omega$ und durch ein $220\Omega$-Potentiometer ersetzt, um die Ausgangsspannung mit einer Obergrenze von 3V Regeln zu können. Auf Grund der Tatsache, dass der Laser erst ab einer Spannung von ca. $2V$ „zündet“, war es nicht nötig, die Spannung bis $0V$ herunterregeln können, weshalb das $220\Omega$-Potentiometer vollkommen ausreicht.
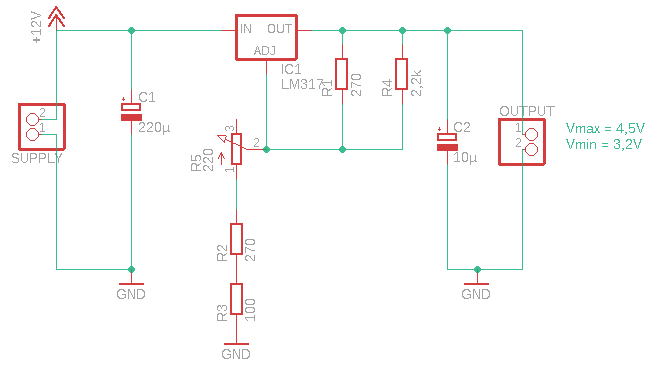
\[R_3=\left(\frac{U_{OUT}}{1,25}-1\right)\cdot R_{1,2}=\left(\frac{3V}{1,25}-1\right)\cdot 240\Omega = 336\Omega\]Da zu dem Zeitpunkt kein $240\Omega$-Widerstand zur Verfügung stand, schaltete ich zwei Widerstände $R_1$ und $R_2$ parallel, die zusammen $240\Omega$ ergaben, was dann einer Ausgangsspannung von $2,89V$ entspricht und vollkommen ausreicht. Für die Wider-stands-Kombination von den für R_(1&2) benötigten 240Ω nahm ich mich der Formel für die Parallelschaltung von Widerständen an und stellte diese nach $R_2$ um (Formel 1). Da mir ein Widerstand mit dem Wert von 270Ω, der am nächsten an die 240Ω der E12-Reihe herankommt, zur Verfügung stand, setzte ich diesen für $R_1$ ein und erhielt für R_2 einen Widerstand von 2160Ω. Ich rundete hierbei auf den nächsten Wert der E12-Reihe $2,2k\Omega$ auf, wobei der dadurch entstehende Fehler noch tolerierbar war.
Beim Nachmessen der Schaltung lag die maximale Ausgangsspannung bei $3,12V$ (Abbildung 14) und die minimale Ausgangsspannung bei $1,84V$ (Abbildung 15). Die Schaltung wurde auf einer Lochraster-platte aufgebaut. Der Festspannungsregler ist zudem auf einem Kühlkörper montiert, da bei der Schaltung eine hohe thermische Verlustleistung entsteht.
Der Schirm & Messskalen
Um mit der Darstellung des zu messenden Signals etwas anfangen zu können braucht man eine Messskala, damit einzelne Punkte abgelesen und somit die Frequenz, Amplitude etc. bestimmt werden können. In den alten Prototypen bestand das Problem, dass die $x$-Achse verzerrt dargestellt wurde, da dort eine Bewegung auf einer Kreisbahn auf eine flache Ebene projiziert wurde. Dieser Fehler konnte nun endlich gelöst werden: Statt eines Flachen Schirms trifft der Laserstrahl nun auf einen gekrümmten, auf dem Kreisbogen $\mathfrak b$ liegenden Schirm. Somit kann das Signal ohne Verzerrung dargestellt werden. Der neue Schirm besteht aus zwei Schienen mit den Maßen des Kreisbogens $b$ (der Radius beträgt ungefähr $20cm$), zwischen denen sich zwei weiße Plastikfolien befinden. Sie erzeugen auf Grund der niedrigen Reflektionen des auftreffenden Laserstrahls ein scharfes, klares Bild. Die Folien stammen aus einem alten LCD-Monitor und dienen dort der Dispersion des Lichts der Hintergrundbeleuchtung. Die Konstruktion wird auf den sich am Mechanik-Modul befindenden Projektionstrichter aufgesteckt und ist abnehm- und austauschbar.
Gehäuse
Das Gehäuse wurde aus 4mm Pappelsperrholz angefertigt und sowohl aus optischen Gründen, als auch als sicherheitstechnischer Warnhinweis in einem auffälligen gelb-schwarzen Streifenmuster bemalt. Es wurde im Inneren mit schwarzer Acryl-Farbe bemalt, um Reflektionen des Lasers zu vermeiden. Die gesamte Mechanik sitzt abgetrennt durch ein 1cm dickes Brett über der Elektronik. An der linken Seite des Gehäuses befindet sich ein Gitter, durch das die über einen Lüfter an der rechten Seite eingesaugte Luft ausgeblasen wird. Dies soll der Kühlung der Elektronik dienen. Zudem befindet sich als Sicherheitsmaßnahme wegen des Lasers an der Seite des Gehäuses ein Schlüsselschalter, der vor unautorisiertem Nutzen des Oszilloskops abhält. Auf der Vorderseite befinden sich Komponenten wie z.B. die Schalter oder Potentiometer, mit denen sich die einzelnen Faktoren wie unter anderem die Umdrehungszahl des Motors einstellen lassen. Dieses „Frontpanel“ besteht aus einer 1mm dicken Aluminiumplatte und wurde darunter mit 4mm Pappelsperrholz verstärkt (Abb. 19). Die einzelnen Elemente werden über Kabel mit Steckverbindungen an die einzelnen Module angeschlossen.
Fazit
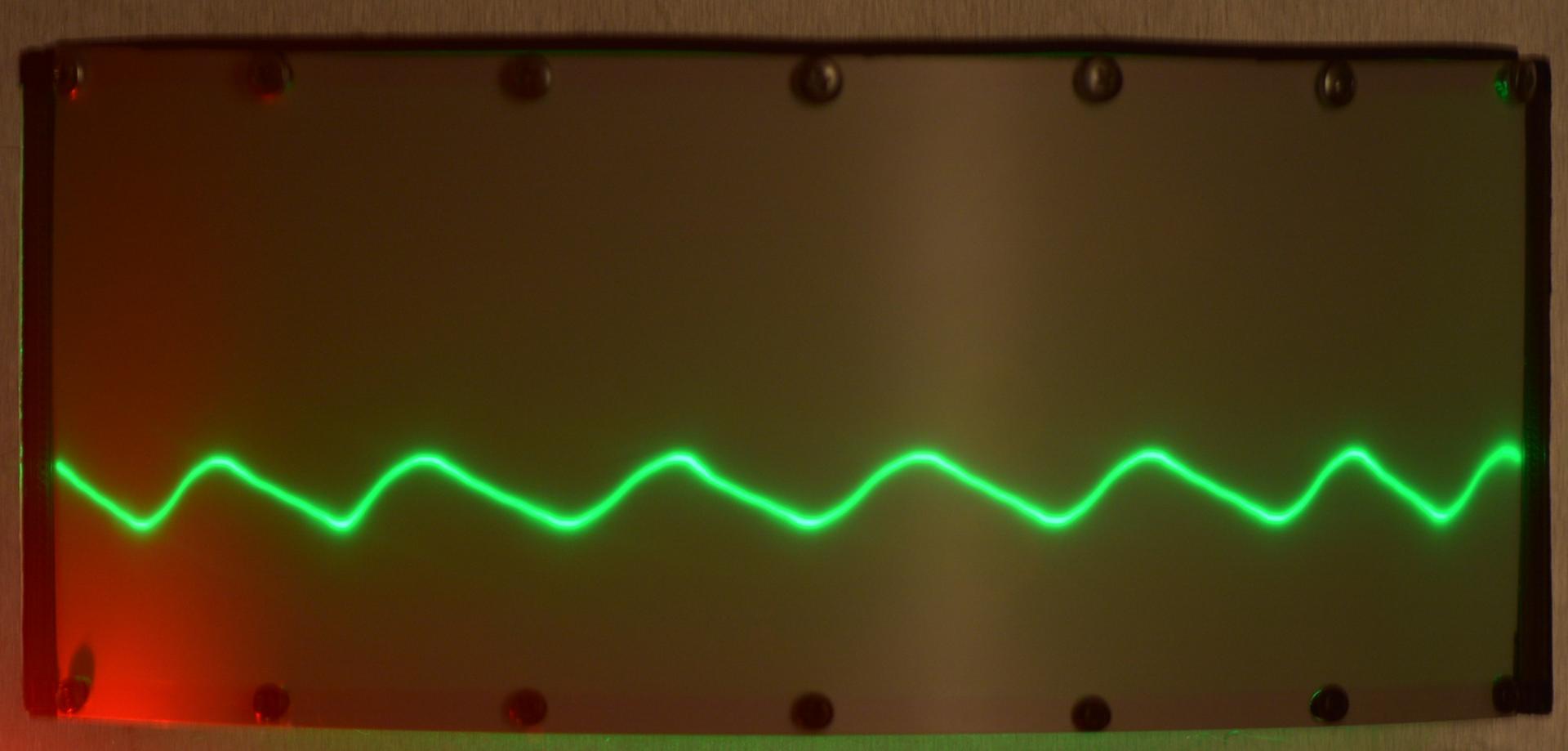
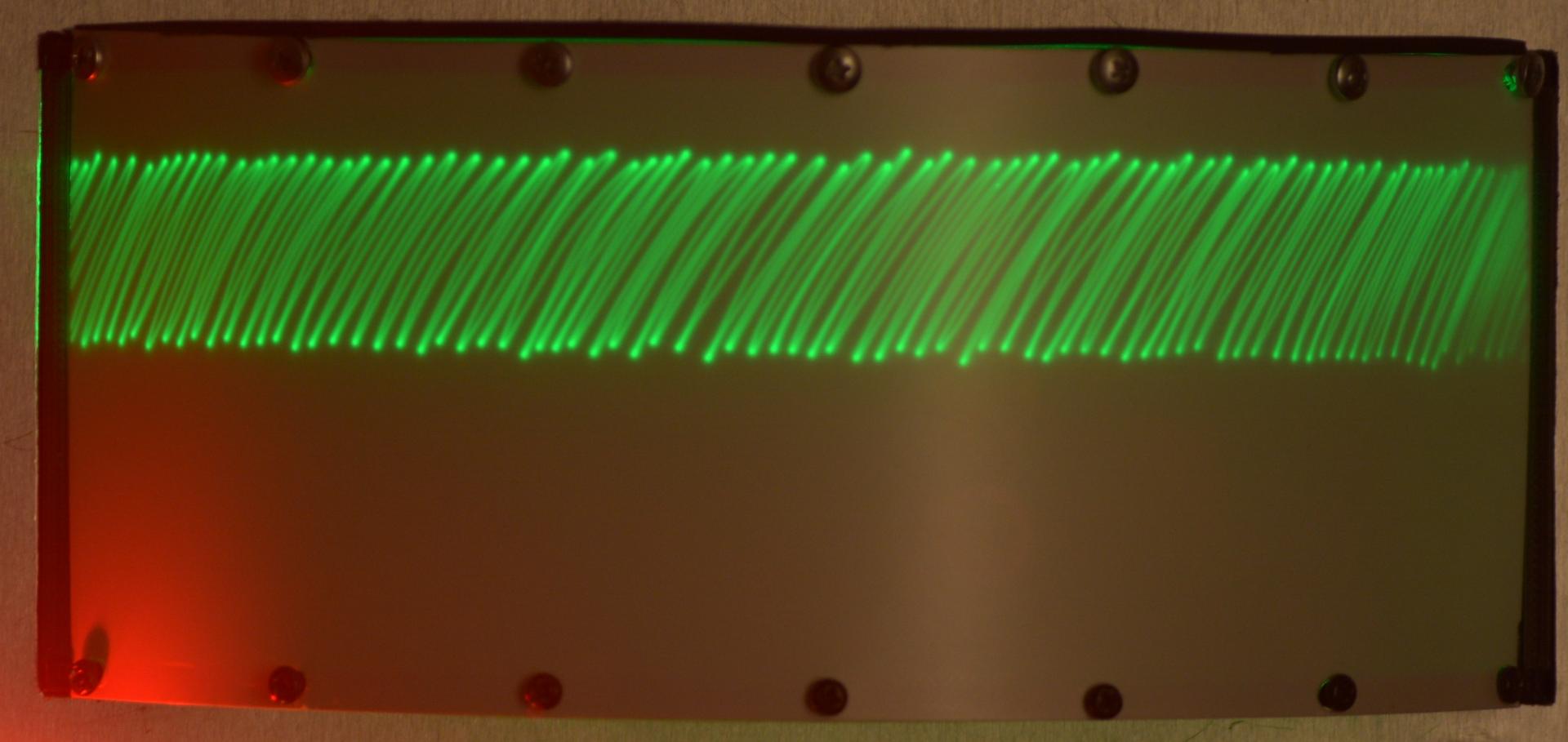
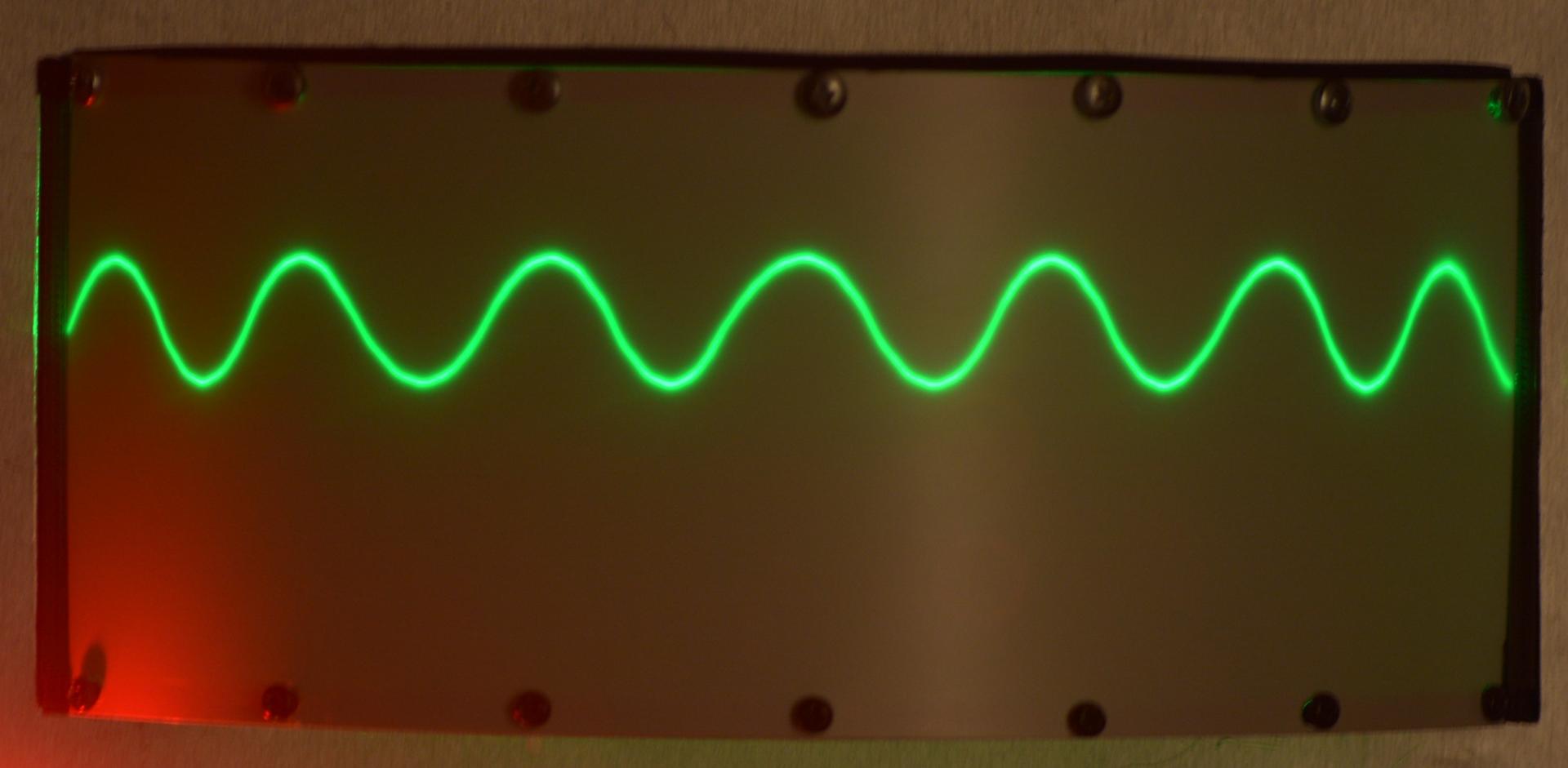
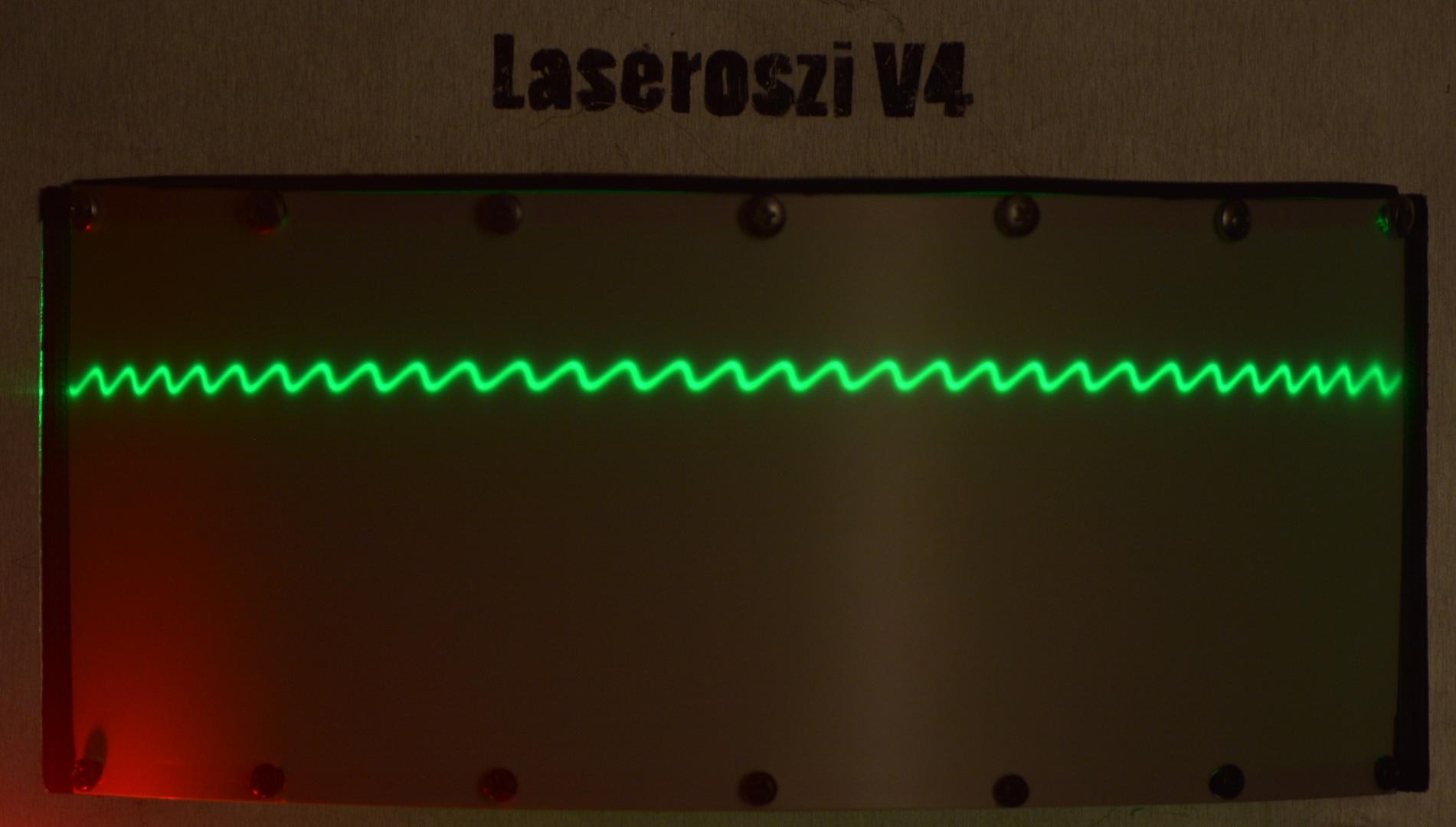
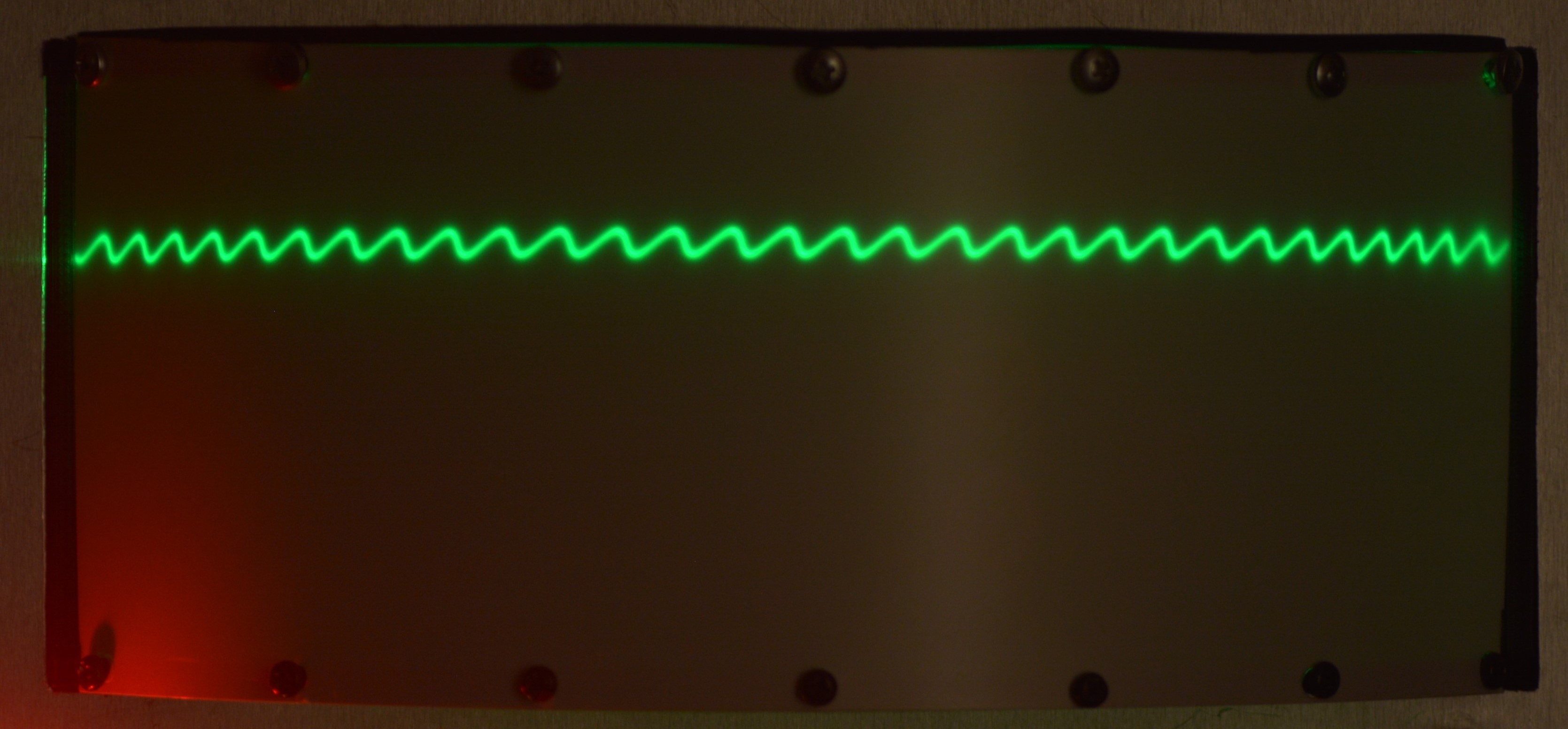
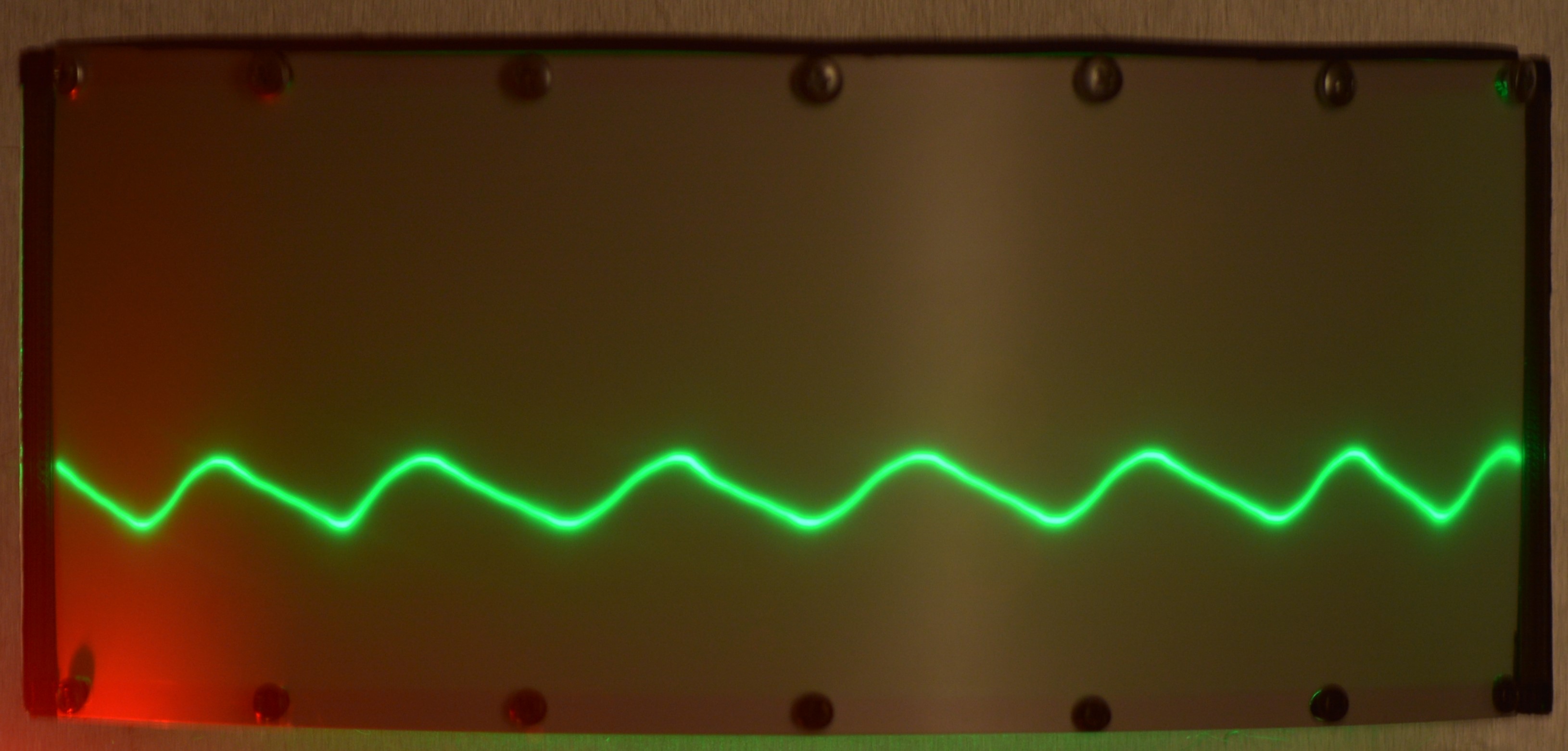
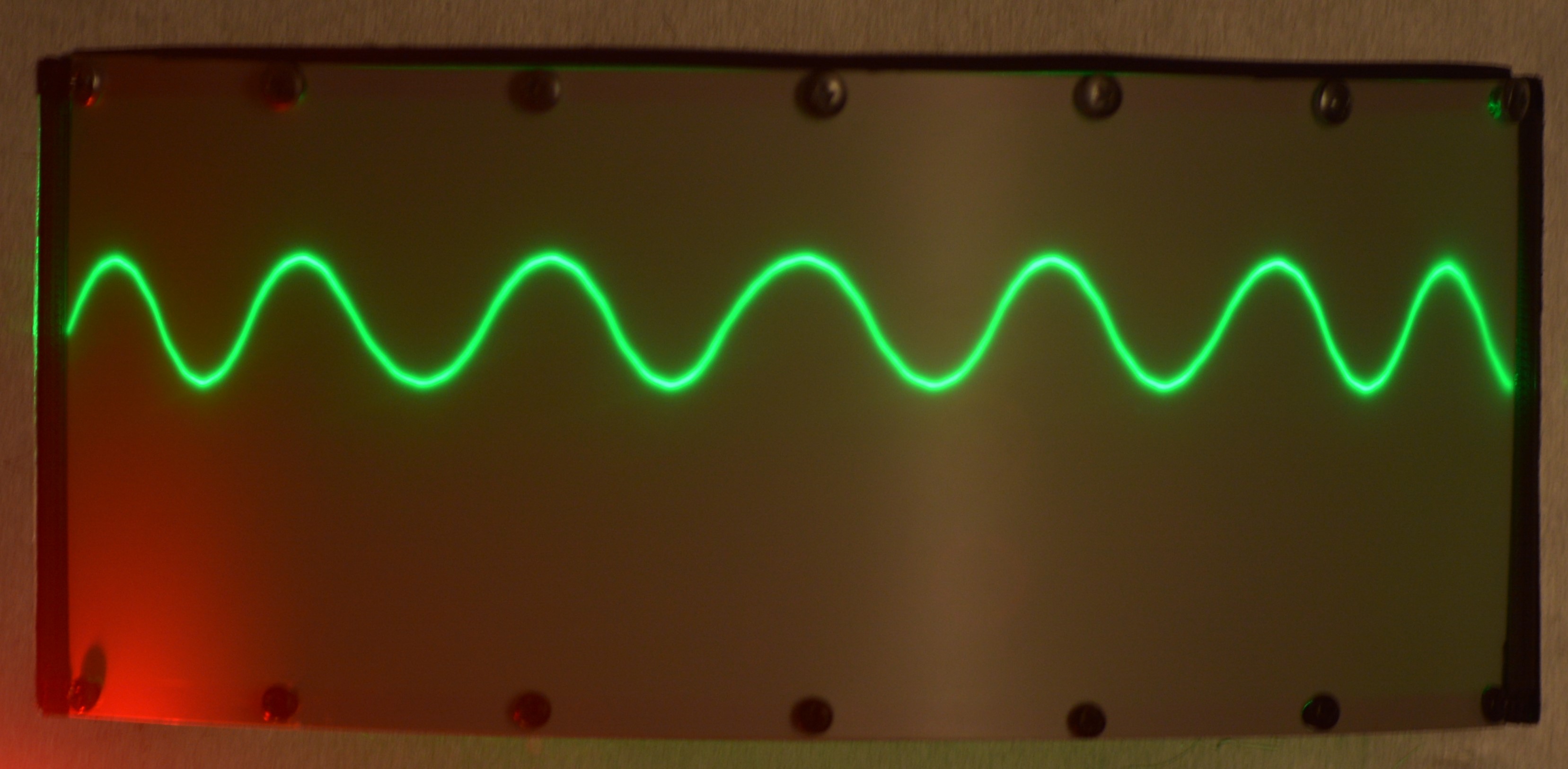
Mit dem mittlerweile 4. Prototyp ist es nun durch die akkuratere verbesserte Mechanik und spezialisiertere Elektronik möglich, außer Sinusspannungen auch z.B. Sägezahnspannungen (Abb. 24, Abb 25) darzustellen. Zudem hat sich die gesamte Bandbreite auf knapp $450-500Hz$ erweitert (Abb. 25), was mehr als eine Verfünffachung der Bandbreite der Vorgängermodelle darstellt.
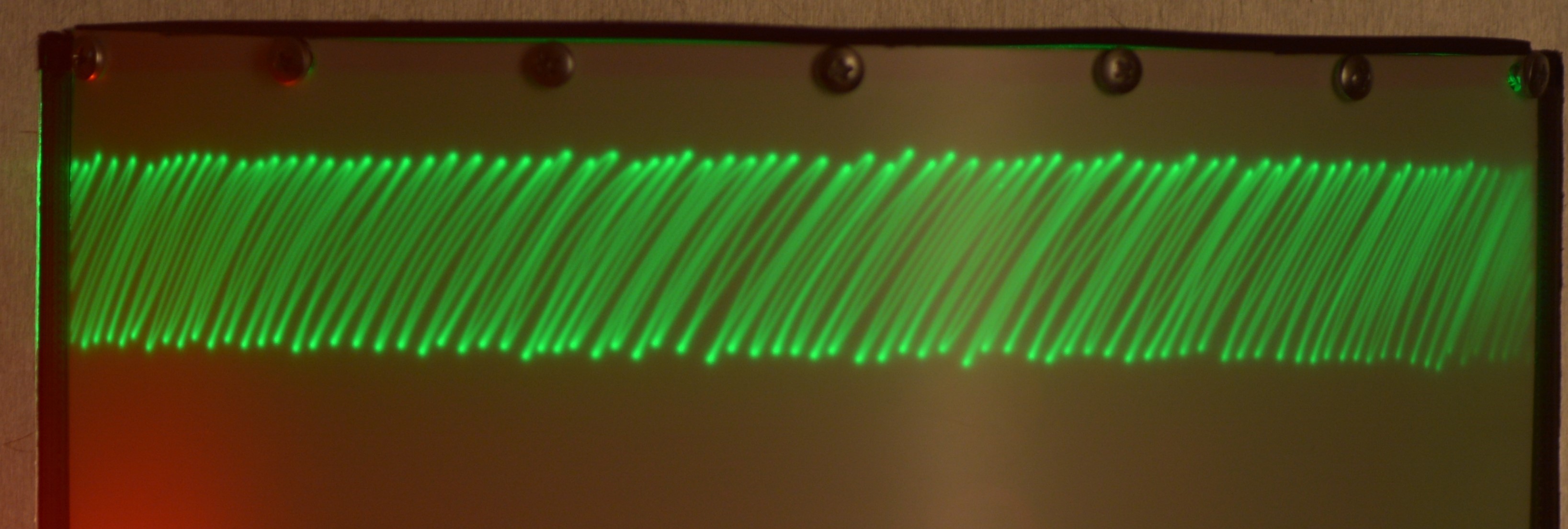
Das Oszilloskop ist dennoch durch die Verzerrung durch die Trägheit der Y-Achse für wirklich akkurate Messungen eigentlich eher in der Praxis unbrauchbar (Abb. 23). Jedoch trägt es dem Verständnis von Mechanik, angewandter Mathematik, Elektronik, Physik und wissenschaftlichem Arbeiten durchaus bei und bietet eine Möglichkeit, sich stetig weiterzubilden und selbst Probleme zu lösen.
Update
Die bessere, neue Version: Laseroszi Zero!
Gallerie